Sensor Data Format
Sensor data 저장 방법
센서를 세팅한 상태에서 시뮬레이터 상에 Space Key를 누른다.
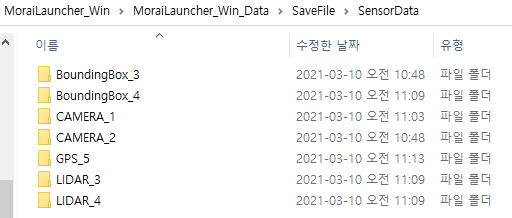
키를 누르면 아래와 같이 SaveFile/SensorData/ 폴더에 센서에서 나오는 센싱 데이터와 라벨 데이터가 Space Key를 누른 시점에 대해서 저장된다.
Lidar Point Cloud
저장 포멧 : bin 파일
bin 파일 4내 4바이트 씩 포인트 클라우드의 x, y, z, intensity가 공백없이 일렬로 저장되어 있음. 원점은 라이다를 마운트한 위치.

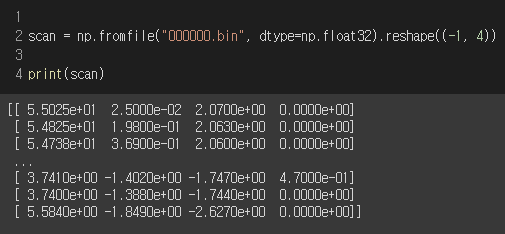
파이썬 사용자의 경우, numpy 의 fromfile 을 통해서 아래와 같이 load가 가능함.
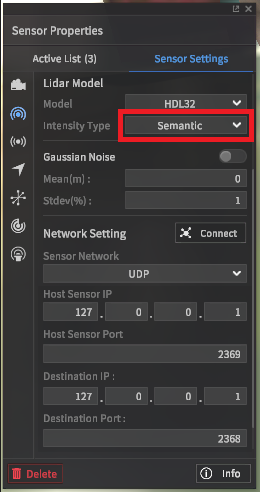
라이다 포인트 클라우드는 semantic 설정 시 차량, 보행자, 차선 등 object class 마다 다른 intensity가 나오도록 되어 있음.
Class | Intensity (unsigned integer 8) |
|---|---|
Vehicle (including cycles) | 255 |
Pedestrian | 100 |
Building | 20 |
White lane | 40 |
Yellow lane | 120 |
Blue lane | 130 |
Crosswalk | 150 |
Asphalt | 127 |
Stop line | 160 |
Standing object | 190 |
Outside | 10 |
Traffic Sign | 30 |
Sidewalk | 170 |
Obstacle | 50 |
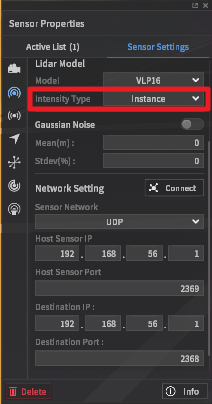
라이다 포인트 클라우드는 instance 설정 시 차량과 보행자 별로 다른 intensity가 나오도록 할 수 있음. 이는 라이다로 잡히는 shape 마다 서로 다른 identity를 부여하기 위한 용도로 쓰임.
Class | Intensity (unsigned integer 8) |
|---|---|
Vehicle | 0 ~ 149 |
Pedestrian | 150 ~ 254. |
Obstacle | Random (50, 100, 150, 200, 250, 45, 90, …) 50씩 증가 |
저장 위치는 SaveFile/SensorData/LIDAR_* 이며, 파일 이름은 포인트 클라우드를 저장한 날짜와 시간으로 정해짐.

3D Bounding Box
저장 포멧 : txt 파일
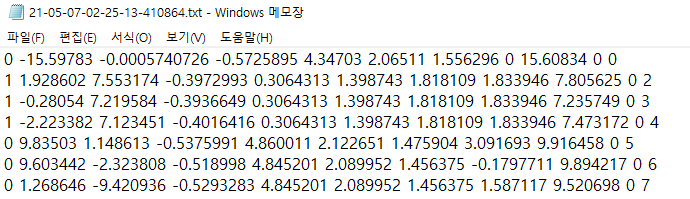
txt 파일 안 3d bbox 포멧
Object 당 총 8개
1 : 3d bbox들의 클래스
Vehicle : 0
Pedestrian : 1
Object : 2
2-4 : box의 x, y, z 중심 (단위 : m) 원점은 라이다 기준.
5-7 : box의 length(x 방향), width(y 방향), height(z 방향) (단위 : m)
8 : box의 heading(z 방향 counter clockwise) (범위 : -pi ~ pi)
9-10 : 상대 거리와 상대 속도 (단위 : m. m/s)
11 : 감지된 물체의 unique ID
저장 위치는 라이다 포인트 클라우드를 저장했을 때와 마찬가지로 SaveFile/SensorData/LIDAR_* 이며, 파일 이름 또한 포인트 클라우드를 저장한 날짜와 시간으로 정해짐.
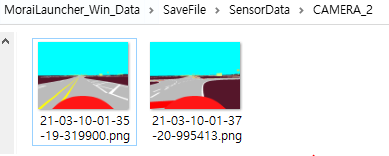
RGB Image
저장 포멧 : jpeg 파일
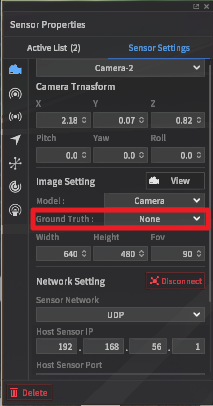
카메라를 설치한 후, 카메라 세팅 패널 창 Image Setting 부분 Ground Truth 항목에 None으로 설정해야 RGB로 저장 됩니다.
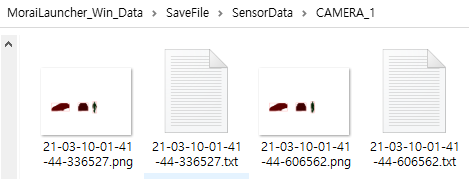
저장 위치는 SaveFile/SensorData/CAMERA_* 이며, 파일 이름은 이미지를 저장한 날짜와 시간으로 정해짐.
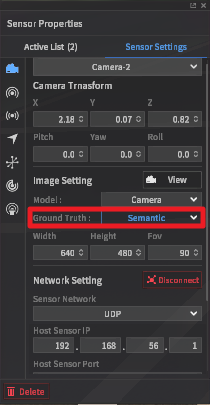
Semantic Segmentation Image
저장 포멧 : png 파일
카메라를 설치한 후, 카메라 세팅 패널 창 Image Setting 부분 Ground Truth 항목에 Semantic으로 설정해야 semantic 라벨 이미지로 저장됨.
Segmentation 이미지 라벨링 맵의 RGB 값은 아래와 같음.
Class | R | G | B |
|---|---|---|---|
Sky | 0 | 255 | 255 |
ETC | 85 | 22 | 42 |
Asphalt | 187 | 187 | 187 |
Building | 203 | 255 | 124 |
Traffic Light | 255 | 147 | 248 |
Whit Lane | 255 | 255 | 255 |
Yellow Lane | 255 | 255 | 0 |
Blue Lane | 0 | 218 | 255 |
Road Sign | 231 | 187 | 124 |
Crosswalk | 148 | 255 | 148 |
Stop Line | 255 | 0 | 0 |
Sidewalk | 255 | 170 | 96 |
Standing OBJ | 178 | 218 | 106 |
Object On Road | 246 | 255 | 22 |
Vehicle | 255 | 22 | 22 |
Pedestrian | 167 | 22 | 255 |
저장 위치와 파일 이름은 RGB 이미지를 저장하는 방식과 동일함.
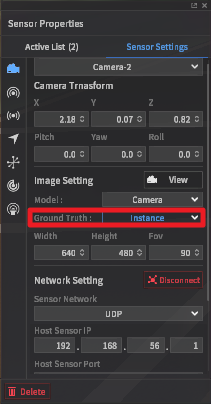
Instance Image
이미지 저장 포멧 : png 파일
2d bbox 라벨링 : txt 파일
카메라를 설치한 후, 카메라 세팅 패널 창 Image Setting 부분 Ground Truth 항목에 instance으로 설정해야 instance 라벨 이미지와 2d bbox로 저장됨.
Instance 라벨 이미지는 같은 클래스라도 다른 픽셀 값으로 라벨링 되어 있어서 클래스 안에 ID 를 구분하도록 만듬.
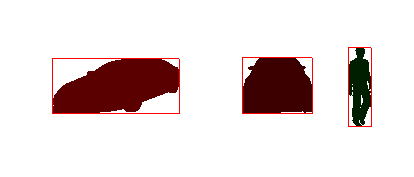
txt 파일 안에 들어가는 2d bbox는 KITTI data set과 되도록 비슷한 포멧으로 구성함.
1 : 2d bbox들의 클래스
Vehicle
Pedestrian
Object
2 : Truncated(1), 현재는 0으로만 출력.
3 : Occluded(1), 현재는 0으로만 출력.
4 : Alpha(1), 현재는 0으로만 출력.
5-8 : 2d bbox의 좌상단 우하단 좌표. 순서대로 x1, y1, x2, y2
9-11 : 물체의 dimension. point cloud 3d bbox와 중복되므로 0으로만 출력
12-14 : 물체의 location. point cloud 3d bbox와 중복되므로 0으로만 출력
15 : 물체의 회전각 (yaw). point cloud 3d bbox와 중복되므로 0으로만 출력
16 : 물체와 카메라간 상대 거리
17-19 : 물체와 카메라간 상대 속도 x, y, z

저장 위치와 파일 이름은 RGB 이미지를 저장하는 방식과 동일함.
GPS data
저장 포멧 : txt 파일
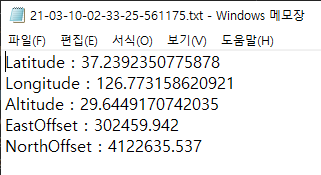
txt 파일 안 GPS data 포멧
1 : Latitude (단위 : deg)
2 : Longitude (단위 : deg)
3 : Altitude (단위 : m)
4 : EastOffset (단위 : m)
5 : NorthOffset (단위 : m)
저장 위치는 SaveFile/SensorData/GPS_* 이며, 파일 이름 또한 저장한 날짜와 시간으로 정해짐.
IMU data
저장 포멧 : txt 파일
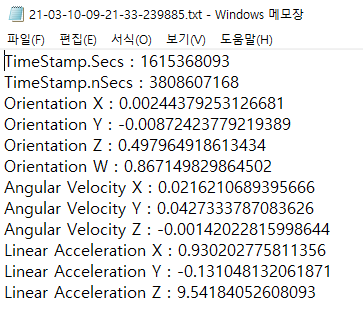
txt 파일 안 IMU data 포멧
1-2 : TimeStamp. 1은 초 단위, 2는 나노초 단위.
3-6 : Orientation X, Y, Z, W. 쿼터니안 기준 각속도.
7-9 : Angular Velocity X, Y, Z. 각속도의 X, Y, Z 축 기준 component (단위 : rad/s)
10-12 : Linear Acceleration X, Y, Z. 각속도의 X, Y, Z 축 기준 component (단위 : m/s^2)
저장 위치는 SaveFile/SensorData/IMU_* 이며, 파일 이름 또한 저장한 날짜와 시간으로 정해짐.
Radar Data
저장 포멧 : bin 파일
bin 파일 4내 4바이트 씩 레이더 데이터의 x, y, z 방향별로 위치와 속도, 가속도 등이 공백없이 일렬로 저장되어 있음. 원점은 레이더를 마운트한 위치.
1-3 : 클러스터의 x, y, z 별 위치
4-6 : 클러스터의 x, y, z 별 속도
7-9 : 클러스터의 x, y, z 별 가속도
10-12 : 클러스터의 x, y, z 별 사이즈
13 : amplitude
파이썬 사용자의 경우, numpy 의 fromfile 을 통해서 아래와 같이 load가 가능함.
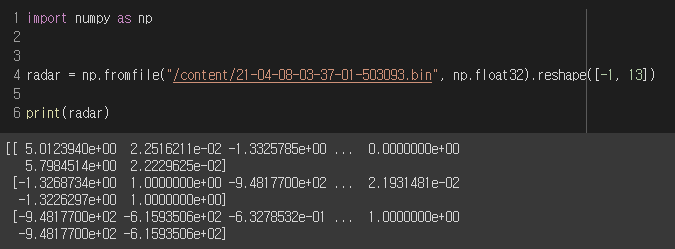
저장 위치는 SaveFile/SensorData/RADAR_* 이며, 파일 이름은 포인트 클라우드를 저장한 날짜와 시간으로 정해짐.