센서 설정
센서 설정을 위한 메뉴 구성
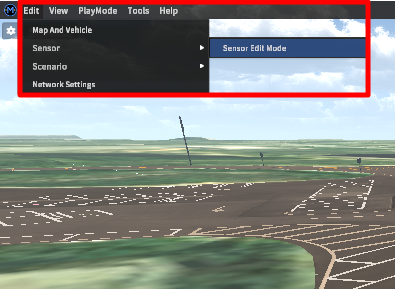
상단 메뉴바의 Edit - Sensor - Sensro Edit Mode 를 클릭하면 지원되는 센서의 에디터가 나타난다.
센서 설정 화면
센서 추가하기

Shift + 왼쪽 클릭으로 원하는 위치에 센서를 배치할 수 있다.
추가되는 센서의 종류는 좌측 하단에 위치한 Active List를 통해 확인이 가능하다.
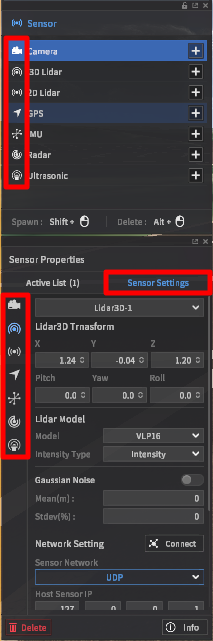
센서를 추가하면 Sensor Settings 패널에서 좌측 상단에 센서명과 매치되는 아이콘을 클릭하면 추가된 센서를 확인할 수 있다.
센서 세부 설정 & 삭제하기

Sensor Settings 패널 클릭후 자신이 원하는 센서의 아이콘을 클릭하면 좌측 하단과 같은 세부 설정을 위한 패널이 나타난다.
각 센서의 장착 위치, 장착 각도, 그리고 센서별 세부 파라미터를 설정할 수 있다. 세부 파라미터에 대해서는 아래에서 별도로 다룬다.
값을 수정한 이후 Confirm을 눌러야 적용된다.
Confirm이후 카메라는 View, GPS , IMU 는 info , Lidar는 vizPath , Radar 는 Viz Radar Range를 통해서 실시간으로 센서의 데이터를 확인 할 수 있다.
센서는 Delete 버튼을 이용하여 삭제할 수 있다. (차량에 붙은 센서 오브젝트에 Alt+왼쪽 클릭으로도 센서를 삭제할 수 있다.)
센서별 세부 파라미터 세팅
고유 파라미터
Camera

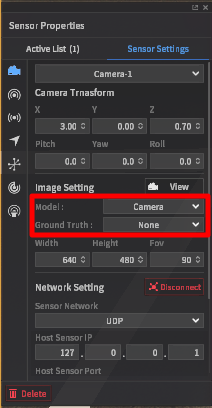
카메라의 X, Y, Z(차량 축 기준), Roll, Pitch, Yaw, 해상도, FOV, Ground Truth 출력 여부를 설정할 수 있다.
네트워크 세팅은 아래에서 별도로 다룬다.
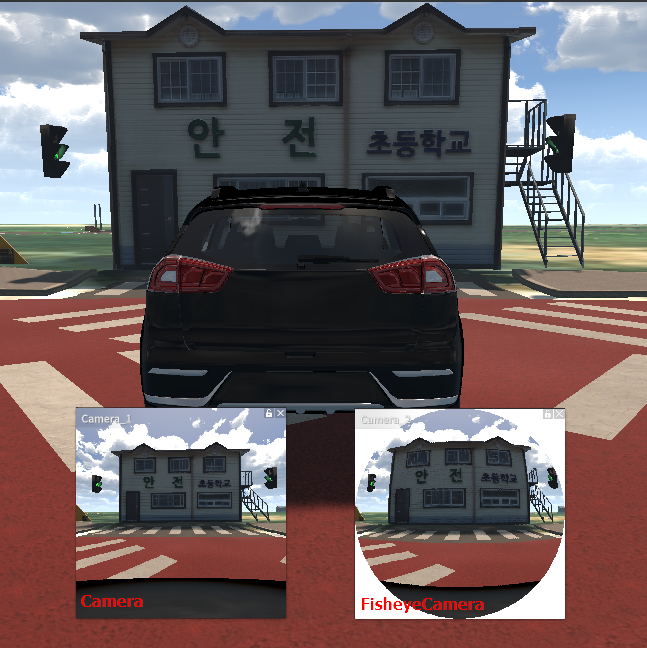
Model : 카메라의 모델을 선택 할 수 있다.
Camera
FishEyeCamera
Ground Truth
None : RGB Camera
Semantic : Semantic Camera
Instance : instance Camera
Lidar

라이다의 X, Y, Z(차량 축 기준), Roll, Pitch, Yaw, Model, Intensity Type을 선택할 수 있다.
네트워크 세팅은 아래에서 별도로 다룬다.
센서 노이즈 관련 정보는 Sensor Noise 생성 기능 사용 방법 를 참고한다.
GPS

GPS의 X, Y, Z(차량 축 기준), Roll, Pitch, Yaw선택할 수 있으나 센서 고유의 파라미터를 변경을 지원하지 않는다.
네트워크 세팅은 아래에서 별도로 다룬다.
Frame Rate(Hz) :ROS 출력 GPS 메세지의 Frame Hz 를 지정한다.
시뮬레이터의 FPS에 따라 목표 FPS보다 낮게 전송될 수 있음.
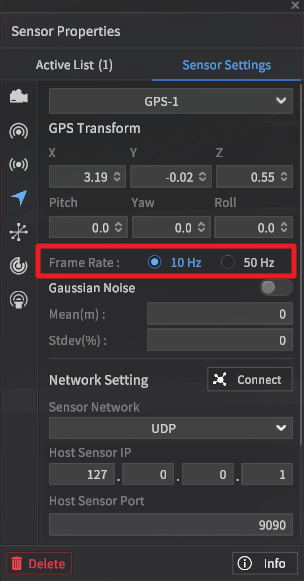
센서 노이즈 관련 정보는 Sensor Noise 생성 기능 사용 방법 를 참고한다.
IMU

IMU의 X, Y, Z(차량 축 기준), Roll, Pitch, Yaw선택할 수 있으나 센서 고유의 파라미터를 변경을 지원하지 않는다.
네트워크 세팅은 아래에서 별도로 다룬다.
Frame Rate(Hz) :ROS 출력 IMU 메세지의 Frame Hz 를 지정한다.
시뮬레이터의 FPS에 따라 목표 FPS보다 낮게 전송될 수 있음.
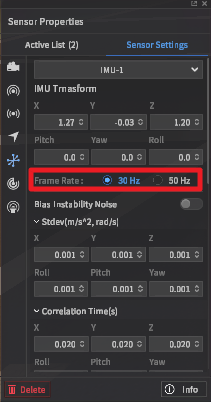
센서 노이즈 관련 정보는 Sensor Noise 생성 기능 사용 방법 를 참고한다.
Radar

Radar의 X, Y, Z(차량 축 기준), Roll, Pitch, Yaw선택할 수 있으나 센서 고유의 파라미터를 변경을 지원하지 않음.
네트워크 세팅은 아래에서 별도로 다룬다.
네트워크 세팅
센서 데이터 출력을 위한 정보이다.
ROS
Camera ROS Message Type
영상정보
Message Type : sensor_msgs/CompressedImage
Default Topic : /imag_jpeg/compressed
타입 설명 : jpg타입의 영상정보.
Lidar ROS Message Type
3D 라이다 정보
UDP통신으로 velodyne_lidar에서 나오는 데이터를 velodyne package를 이용하여sensor_msgs/PointCloud2로 변환 후 사용
roslaunch velodyne_pointcloud 32e_points.launch
GPS ROS Message Type
GPS
Message Type : morai_msgs/GPSMessage
Default Topic : /gps
타입 설명 : GPS정보
IMU ROS Message Type
IMU
Message Type : sensor_msgs/Imu
Default Topic : /Imu
타입 설명 : IMU정보
UDP
Camera UDP Protocol
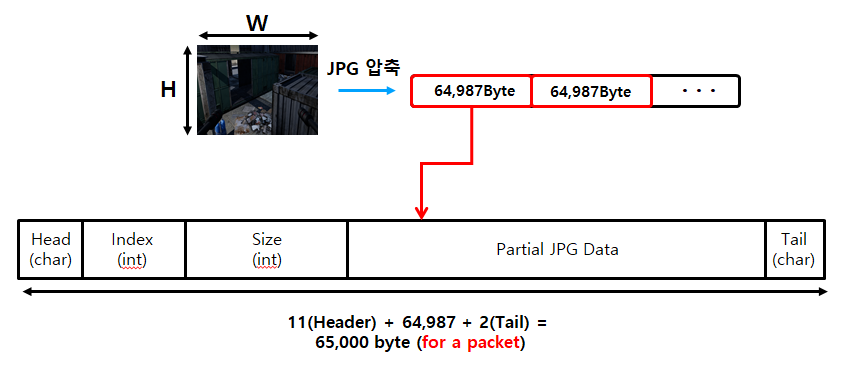
전체 패킷 크기 : 65000 Bytes
데이터 크기 : 64987 Bytes
JPG 파일로 압축하고, 최대 64987 Bytes만큼 block으로 분할한 다음, block index를 같이 매겨서 전송.
Head(char)
데이터 설명 : MOR. 데이터의 시작 문구.
Data Block Index(int)
데이터 설명 : 분할된 block의 index.
Data Block Size(int)
데이터 설명 : 전송받은 block의 크기.
Data(bytes)
데이터 설명 : 분할된 JPG block의 내용.
Tail(char)
데이터 설명 : AI 혹은 EI. AI인 경우엔 분할된 block이 더 남아있다는 뜻이며, EI인 경우는 분할된 JPG block들 중 가장 마지막을 의미한다.
GPS UDP Protocol
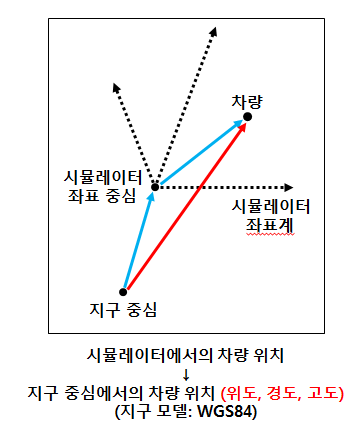
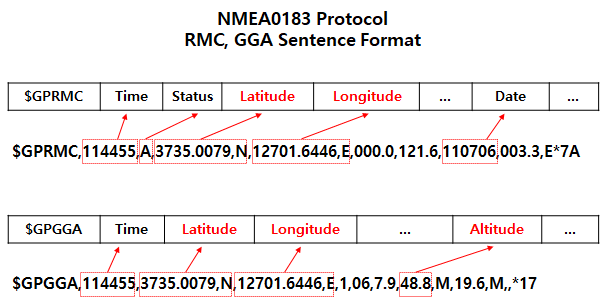
NMEA0183 Protocol을 따르고, RMC/GGA sentence 두가지 format으로 동시에 들어온다.
Format Type(char)
데이터 설명 : GPRMC/GPGGA. Format의 종류를 나타낸다.
Time(float)
데이터 설명 : GPS 정보가 들어올 때의 time stamp.
차량 위치 정보(Lat/Long/Alt, float)
데이터 설명 : GPS 센서에서 측정한 위도/경도/고도.
Lidar UDP Protocol
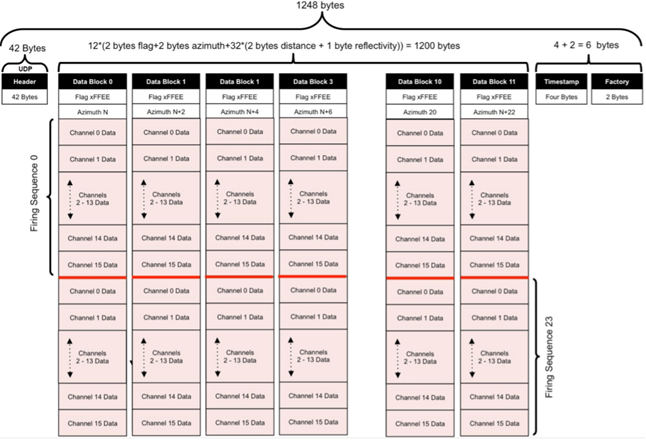
시뮬레이터의 Lidar Protocol은 Velodyne의 Protocol을 그대로 따른다.
IMU Protocol
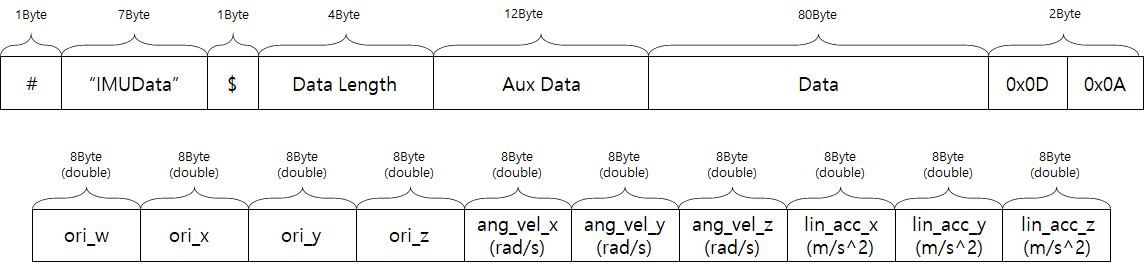
전체 패킷 크기 : 107 Bytes
데이터 크기 : 80 Bytes
Orientation(ori_*)
방향을 나타내는 데이터이며 Quaternian이다.
Angular Velocity(ang_vel_*)
각속도를 나타내는 데이터이며 rad/s 단위이다.
Linear Acceleration(lin_acc_*)
가속도를 나타내는 데이터이며 m/s^2 단위이다.
센서 설정 저장하기 & 불러오기

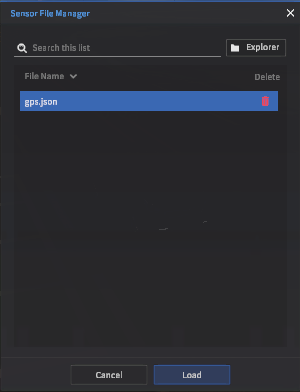
좌측 하단의 Save 버튼을 통해 현재의 센서 설정값을 파일에 저장할 수 있다.
Sensor File Manager 는 현재 저장된 센서 설정 파일을 보여주며, 각 파일을 로드하거나 삭제할 수 있다.