ROS 메시지 설정 방법 및 타입 설명
ROS 메시지 파일 다운로드 링크
개발용 Linux 환경에 직접 다운로드 가능하도록 아래 GitHub 링크를 제공한다.
https://github.com/morai-developergroup/morai_msgs
ROS 메시지 설정
ROS 메시지의 주기, 명칭, 등 주요 설정은 Network Settings 창에서 설정이 가능하다.
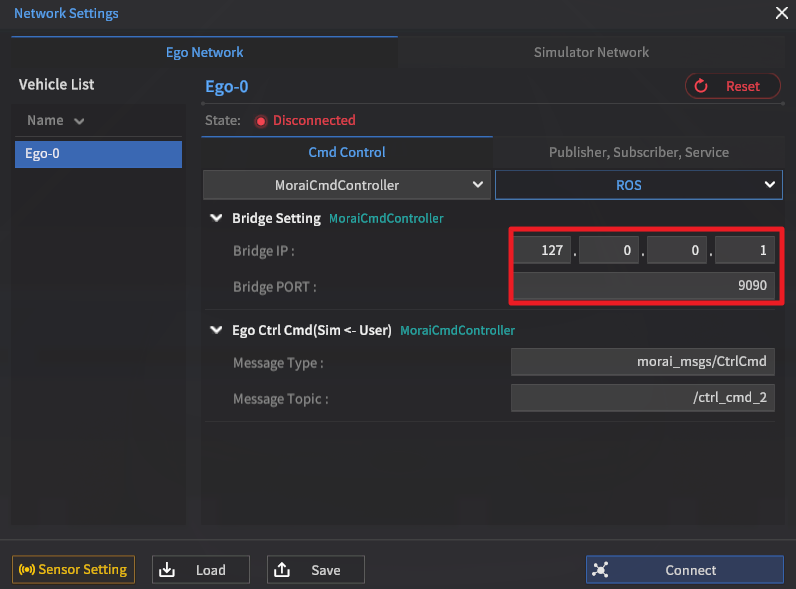
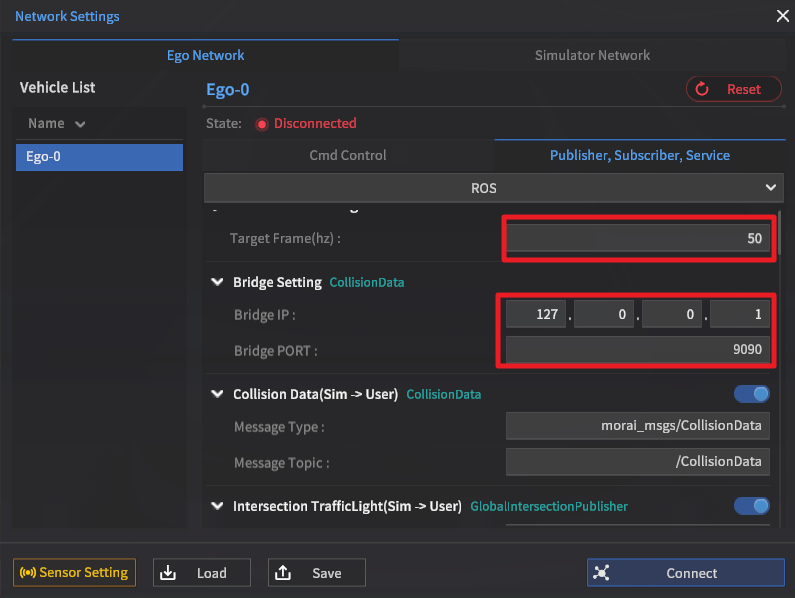
Network Settings
Bridge Setting
ROS Bridge 의 IP 와 Port 번호를 입력한다.
Frame Rate Setting
ROS 출력 메세지의 Frame Hz 를 지정한다. (최대 120 Hz)
시뮬레이터의 FPS에 따라 목표 FPS보다 낮게 전송될 수 있음.
ROS Message Type (Publish - Subscribe Model)
Ego Ctrl Cmd
차량 제어 명령
MoraiCmdController
Message Type : morai_msg/CtrlCmd
Default Topic : /ctrl_cmd
타입 설명 : Ego 차량을 제어하기 위한 메시지
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | longCmdType | int32 | 제어 방식을 결정하는 인덱스 | |
2 | accel | float64 | - | 차량의 가속 패달 값을 의미하며 0~1 범위를 가진다. |
3 | brake | float64 | - | 차량의 브레이크 패달 값을 의미하며 0~1범위를 가진다. |
4 | steering | float64 | rad | 차량 앞 바퀴 각도(Wheel Angle)을 의미하며 Rad 단위이다. |
5 | velocity | float64 | km/h | (Only active if CmdType == 2) |
6 | acceleration | float64 | m/s2 | (Only active if CmdType == 3) |
Ghost Ctrl Cmd
Ghost Mode Ego 차량 제어 명령
Message Type : morai_msgs/GhostMessage
Default Topic : /GhostCtrlCmd
타입 설명 : Ghost Mode 이용 Ego 차량을 제어하기 위한 메세지
Ghost Mode : 차량을 원하는 위치에 생성 할 수 있는 모드이다.
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | position | m | ego 차량의 위치 지정 | |
2 | heading | float64 | deg | 차량의 heading(deg)를 나타냄. |
Ego Vehicle Status
차량 상태 정보
MoraiInfoPublisher (Sim → User)
Message Type : morai_msgs/EgoVehicleStatus
Default Topic : /Ego_topic
타입 설명 : 제어 차량의 상태 정보를 나타내는 메시지
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | Message header |
2 | unique_id | int32 | - | 오브젝트의 unique id 값 |
3 | acceleration | ego 차량의 현재 가속도 벡터 값 | ||
4 | position | m | ego 차량의 현재 위치 | |
5 | velocity | ego 차량의 현재 속도 벡터 값 | ||
6 | heading | float64 | deg | 차량의 heading(deg)를 나타냄. |
7 | accel | float32 | - | 차량의 가속 패달의 상태 값 0~1 범위를 가진다. |
8 | brake | float32 | - | 차량의 브레이크 패달의 상태 값 0~1 범위를 가진다. |
9 | wheel_angle | float32 | deg | 차량의 현재 앞 바퀴 각도(Wheel Angle) 값 |
Object Info
주변 물체 정보
MoraiObjectInfoPublisher (Sim → User)
Message Type : morai_msgs/ObjectStatusList
Default Topic : /Object_topic
타입 설명 : 사용자가 배치한 주변 물체들에 대한 정보를 나타내는 메시지
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | num_of_npcs | int32 | - | 사용자가 배치한 npc 차량의 개수. |
3 | num_of_pedestrian | int32 | - | 사용자가 배치한 pedestrian의 개수. |
4 | num_of_obstacle | int32 | - | 사용자가 배치한 obstacle(static objects)의 개수. |
5 | npc_list | - | npc 차량 정보 ( 아래의 ObjectStatus 타입 참고) | |
6 | pedestrian_list | - | pedestrian 정보 ( 아래의 ObjectStatus 타입 참고) | |
7 | obstacle_list | - | obstacle 정보 ( 아래의 ObjectStatus 타입 참고) |
Object Status
ObjectStatus 는 MoraiObjectInfoPublisher 에서 사용되는 목록으로 독립되어서 사용되는 ROS Topic 이 없음.
ROS message details
Message Type: morai_msgs/ObjectStatus
NOTE 차량의 위치 값은 ENU 좌표계로 표시됨.(x: east, y: north, z: up)
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | unique_id | int32 | - | 물체의 unique id 값 |
2 | type | int32 | - | 0: Pedestrian, 1: NPC vehicle, 2: Static object (obstacle), -1: Ego-vehicle |
3 | name | string | - | 물체의 이름 |
4 | heading | float64 | - | 물체의 heading(deg)를 나타냄. |
5 | velocity | 물체의 현재 속도 벡터 값 | ||
6 | acceleration | 물체의 현재 가속도 벡터 값 | ||
7 | size | m | 물체의 크기 (width, length, height) | |
8 | position | m | 물체의 현재 위치 |
Multi Ego Setting
Multi_Ego 제어 명령
MultiEgoTransformHandler (User → Sim)
Message Type : morai_msgs/MultiEgosetting
Default Topic : /ego_setting
타입 설명 : MultiEgo 에 대한 정보 메세지 타입
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | number_of_ego_vehicle | int32 | - | Multi_ego vehicle의 수 |
2 | camera_index | int32 | - | Multi_ego 세팅 시 바라볼 차량의 unique index |
3 | ego_index | int32[] | - | 제어할 Multi_ego 의 unique index |
4 | global_position_x | float64[] | Multi_ego의 현재 X-axis 위치 | |
5 | global_position_y | float64[] | Multi_ego의 현재 Y-axis 위치 | |
6 | global_position_z | float64[] | Multi_ego의 현재 Z-axis 위치 (elevation) | |
7 | global_roll | float32[] | Multi_ego의 현재 roll각도 | |
8 | global_pitch | float32[] | Multi_ego의 현재 pitch 각도 | |
9 | global_yaw | float32[] | Multi_ego의 현재 heading 각도 | |
10 | velocity | float32[] | Multi_ego의 velocity | |
11 | gear | int8[] | - | 1: Parking, 2: Reverse, 3: Neutral, 4: Drive |
12 | ctrl_mode | int8[] | - | 1: keyboard mode, 16: automode |
Collision Data
충돌 정보
CollisionData (Sim → User)
Message Type : morai_msgs/CollisionData
Default Topic : /CollisionData
타입 설명 : Ego 차량과의 충돌 데이터를 나타내는 메시지
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | global_offset_x | float32 | The x-axis position of the collided object w.r.t the map coordinate system | |
3 | global_offset_y | float32 | The y-axis position of the collided object w.r.t the map coordinate system | |
4 | global_offset_z | float32 | The z-axis position of the collided object w.r.t the map coordinate system | |
5 | collision_object | - | Ego 와 충돌한 Object 정보 |
NPC Vehicle Collision Data
NPC 충돌 정보
VehicleCollisionInfoPublisher (Sim → User)
Message Type : morai_msgs/VehicleCollisionData
Default Topic : /VehicleCollisionData
타입 설명 : NPC 차량의 충돌 데이터를 나타내는 메시지
Header header
VehicleCollision[] collisions : 충돌 NPC 차량 List
ObjectStatus[] crashed_vehicles : 충돌한 NPC 차량 정보 ( 아래의 ObjectStatus 타입 참고)
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | collisions | - | 충돌한 NPC 차량의 목록 |
Vehicle Collision List
VehicleCollision 는 VehicleCollisionInfoPublisher 에서 사용되는 목록으로 독립되어서 사용되는 ROS Topic 이 없습니다.
ROS message details
Message Type: morai_msgs/VehicleCollision
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | crashed_vehicles | - | 충돌한 NPC 차량의 정보 |
Get TrafficLight Status
신호등 상태 정보
TLCtrlPublisher (Sim → User)
Message Type : morai_msgs/GetTrafficLightStatus
Default Topic : /GetTrafficLightStatus
타입 설명 : TrafficLight 에 대한 정보를 나타내는 메시지
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | trafficLightIndex | string | - | TrafficLight 의 unique index 값 |
3 | trafficLightType | int16 | - | TrafficeLight의 LightType 값 0: Red/Yellow/Green |
4 | trafficLightStatus | int16 | - | TrafficeLight의 Status 값 1: Red Combined lights (multiple lights on simultaneously) can be applied using standard bitwise operations |
Set TrafficLight Control
신호등 상태 제어
TLCtrlSubscriber (User → Sim)
Message Type : morai_msgs/SetTrafficLight
Default Topic : /SetTrafficLight
타입 설명 : TrafficLight의 상태를 제어하기 위한 메시지
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | trafficLightIndex | string | - | TrafficLight 의 unique index 값 |
2 | trafficLightStatus | int16 | - | TrafficeLight의 Status 값 1: Red |
Get Intersection Status
교차로 정보
IntersectionStatusPublisher (Sim → User)
Message Type : morai_msgs/IntersectionStatus
Default Topic : /InsnStatus
타입 설명 : 교차로 신호등 정보
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | intersection_index | string | - | 교차로 index |
3 | intersection_status | int16 | - | 교차로 상태 |
4 | intersection_status_time | float32 | - | 현재 교차로 상태로 지난 시간(s) |
Set Intersection Control
교차로 제어
IntersectionControlSubscriber (User → Sim)
Message Type : morai_msgs/IntersectionControl
Default Topic : /InsnControl
타입 설명 : 교차로 신호등 제어 정보
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | intersection_index | string | - | 교차로 index |
3 | intersection_status | int16 | - | 교차로 상태 |
4 | intersection_status_time | float32 | - | 현재 교차로 상태로 지난 시간(s) |
Scenario Load
MORAISLSubscriber (User → Sim)
Message Type : morai_msgs/ScenarioLoad
Default Topic : /ScenarioLoad
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | file_name | string | - | load 할 Scenario_file_name |
2 | delete_all | bool | - |
|
3 | load_network_connection_data | bool | - |
|
4 | load_ego_vehicle_data | bool | - |
|
5 | load_surrounding_vehicle_data | bool | - |
|
6 | load_pedestrian_data | bool | - |
|
7 | load_object_data | bool | - |
|
8 | set_pause | bool | - |
|
SaveSensorData
센서 Data 저장
SensorSyncDataSubscriber (User → Sim)
Message Type : morai_msgs/SaveSensorData
Default Topic : /SaveSensorData
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | is_custom_file_name | bool | - | Determines if the save file name is custom input by the user |
2 | custom_file_name | string | - | The custom save file name input by the user |
3 | file_dir | string | - | The full path string of the save file |
Turn Signal Lamp Control
Lamps
Message Type : morai_msgs/Lamps
Default Topic : /lamps
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | turnSignal | int8 | - | 0: No signal, 1: Left turn signal, 2: Right turn signal |
3 | emergencySignal | int8 | - | 0: No signal, 1: Emergency lamps on |
Replay Info Publisher
Replay Info Publisher
MoraiReplayInfoPublisher (Sim → User)
Message Type : morai_msgs/ReplayInfo
Default Topic : /ReplayInfo_topic
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | ego_acc | float64 | - | 차량의 가속 패달 값을 의미하며 0~1 범위를 가진다. |
3 | ego_brake | float64 | - | 차량의 브레이크 패달 값을 의미하며 0~1범위를 가진다. |
4 | ego_steer | float64 | deg | 차량 앞 바퀴 각도(Wheel Angle)을 의미하며 degree 단위이다. |
5 | orientation | - | Current orientation | |
6 | linear_acceleration | Current acceleration | ||
7 | angular_velocity | Current angular velocity | ||
8 | num_of_npcs | int32 | - | 사용자가 배치한 npc 차량의 개수. |
9 | num_of_pedestrian | int32 | - | 사용자가 배치한 pedestrian의 개수. |
10 | num_of_obstacle | int32 | - | 사용자가 배치한 obstacle(static objects)의 개수. |
11 | npc_list | - | npc 차량 정보 | |
12 | pedestrian_list | - | pedestrian 정보 | |
13 | obstacle_list | - | obstacle 정보 |
MoraiSImprocStatusPublisher
MoraiSImprocStatusPublisher (Sim → User)
Message Type : morai_msgs/MoraiSimProcStatus
Default Topic : /sim/process/state/msg/MoraiSimProcStatus
Header header
uint8 sim_process_status
1 : play
2 : Pause
Time latest_command_time
마지막 SimProcHandler값이 들어온 시간(SimProcHandler/header에 있는 시간 사용)
아직 한 번도 안들어 왔다면 0
int8 command_result
0x00 (한 번도 데이터가 들어오지 않았을 경우)
0x01(success)
0xn0(fail)
0x10: fail
0x20: fail to load rosbag file
0x30: load rosbag file first
int8 current_mode
0x01(Simulation)
0x10(Replay)
int8 current_status
0x01(Playing)
0x10(Paused)
0x20(Paused, end of rosbag file → replay 모드에서만 사용 됨)
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | latest_command_time | - | 마지막 SimProcHandler값이 들어온 시간(SimProcHandler/header에 있는 시간 사용) 아직 한 번도 안들어 왔다면 0 | |
3 | command_result | int8 | - | 0x00: initial, 0x01: success, 0x10: command failed, 0x20: failed rosbag file load, 0x30: loaded rosbag but failed |
4 | current_mode | int8 | - | 0x01: simulation mode, 0x10: replay mode |
5 | current_status | int8 | - | 0x01: running, 0x10: paused, 0x20: paused and reached end of rosbag file |
SensorPoseSubscriber
Message Type : morai_msgs/SensorPosControl
Default Topic : /SensorPosControl
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | sensor_index | int16 | - | 위치를 제어할 센서 인덱스 번호 이름 |
2 | pose_x | float32 | m | |
3 | pose_y | float32 | m | |
4 | pose_z | float32 | m | |
5 | roll | float32 | rad | Sensor roll angle |
6 | pitch | float32 | rad | Sensor pitch angle |
7 | yaw | float32 | rad | Sensor yaw angle |
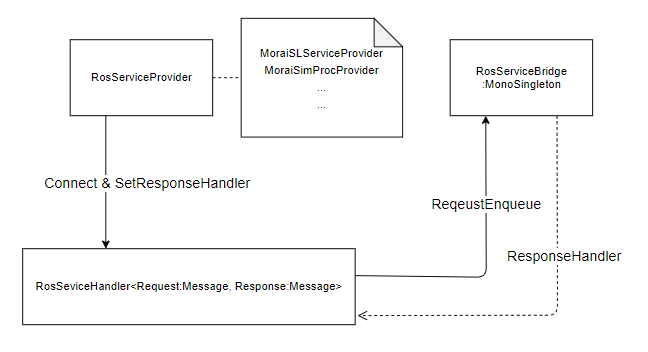
아래부터는 ROS의 service 프로토콜에 대해 설명함.
ROS Message Type (Service Model)
: Pub/Sub방식 뿐 아니라 Service방식으로 시뮬레이터를 제어 할 수 있음.
기본 구조
ROSBAG 호출 메시지
Morai SimProcService Provider(User → Sim)
Service Name : /Morai_SimProc
srv : morai_msgs/MoraiSimProcSrv
Request Message Type : morai_msgs/MoraiSimProcHandle
int8 sim_process_status
0x01(Play)
0x10(Pause)
0x20(Stop - replay 모드에서만 사용 replay를 완전 종료)
아래 부터 mode = 0x10 (replay 모드) 일 때만 사용 가능하다
short replay_option
0x0001 (load file)
0x0010 (target)
0x0100 (start time)
0x1000 (배속 조절)
파일을 새로 로드 하고 target을 지정하고 싶으면
0x0011 (start time은 default로 0초부터 시작)
리플레이 중에 target을 지정하고 시작지점을 변경하고자 할 때
0x0110 (리플레이 중이 아니라면 SimProcStatus에서 에러 result를 보낸다.)
string rosbag_file_name
short replay_target_option
0x0001 (Ego)
0x0010 (NPC)
0x0100 (Pedestrian)
float start_time(millisecond)
int32 replay_speed (추가)
배속 값(1배속, 2배속…)
Response Message Type : morai_msgs/MoraiSrvResponse
bool result : Service request 에 대한 결과
ScenraioLoad 메시지
Morai SLService Provider (User → Sim)
Service Name : /Service_MoraiSL
srv : morai_msgs/MoraiScenarioLoadSrv
Request Message Type : morai_msgs/ScenarioLoad
string file_name : load 할 Scenario_file_name
bool delete_all
True : Ego를 제외한 Scenario Data를 Delete 하고 Load
False : 모든 Scenario Data Load
delete_all 이 False 일때 아래의 Load Option을 사용해서 원하는 Scenario Data Load 가능.
bool load_ego_vehicle_data
True : Ego Scenario Data Load
False : Ego Scenario Data Load 안함
bool load_surrounding_vehicle_data
True : NPC Vehicle Scenario Data Load
False : NPC Vehicle Scenario Data Load 안함
bool load_pedestrian_data
True : pedestrian Scenario Data Load
False : pedestrian Scenario Data Load 안함
bool load_object_data
True : Object Scenario Data Load
False : Object Scenario Data Load 안함
bool set_pause
True : Scenario Load 후 Pause 상태로 유지 (Esc 키를 입력하여 Play 상태 전환 가능)
False : Scenario Load 후 바로 Play상태로 전환
Response Message Type : morai_msgs/MoraiSrvResponse
bool result : Service request 에 대한 결과
Traffic Light 상태 호출 메시지
Morai SLService Provider (User → Sim)
Service Name : /Morai_TLSrv
srv : morai_msgs/MoraiTLInfoSrv
Request Message Type : morai_msgs/MoraiTLIndex
string idx : Traffic Light Idx
Response Message Type : morai_msgs/MoraiTLInfo
Header header
string idx : Traffic Light Idx
int16 status : Traffic Light의 상태 정보
RED: 1
Yellow : 4
Green : 16
GLEFT : 32
Green_with_GLeft : 48
Red_wiht_GLeft : 33
Red_with_Y = 5
Yellow_with_G = 20
Yellow_with_GLeft = 36
이벤트 제어 요청 메시지
Morai Event Cmd Service Provider (User → Sim)
Service Name : /Service_MoraiEventCmd
srv : morai_msgs/MoraiEventCmdSrv
Request Message Type : morai_msgs/EventInfo
int8 option : 이벤트 제어를 요청하는 필드 옵션
1 : ctrl_mode
2 : gear
4 : lamps
8 : set_pause
int32 ctrl_mode : 차량의 control mode 제어
1: Keyboard
2: GameWheel
3: automode
4 : cruisemode
int32 gear : 차량의 기어 변경
-1 : 이전 상태 유지
1 : P
2 : R
3 : N
4 : D
morai_msgs/Lamps lamps : 방향 지시등 제어
Header header
int8 turnSignal
0 : No Signal
1 : Left Signal
2 : Right Signal
3 : 이전 상태 유지
int8 emergencySignal
0 : No Signal
1 : Emergency Signal
bool set_pause
True : 시뮬레이터 Pause 상태로 유지 (Esc 키를 입력하여 Play 상태 전환 가능)
False : 시뮬레이터 Play상태로 전환
Response Message Type : morai_msgs/MoraiEventCmdSrv
int32 ctrl_mode : 차량의 control mode 현재 상태
int32 gear : 차량의 기어 현재 상태
morai_msgs/Lamps lamps : 방향 지시등 현재 상태
bool set_pause : 시뮬레이터 현재 상태
차량 스펙 호출 메시지
Morai Vehicle Spec Service Provider (User → Sim)
Service Name : /Service_MoraiVehicleSpec
srv : morai_msgs/MoraiVehicleSpecSrv
Request Message Type : morai_msgs/VehicleSpecIndex
int32 unique_id : 차량의 unique_id
Response Message Type : morai_msgs/VehicleSpec
int32 ctrl_mode : 차량의 control mode 현재 상태
geometry_msgs/Vector3 position : 차량의 크기 벡터
float64 x : 물체의 x(m단위) 크기.
float64 y : 물체의 y(m단위) 크기.
float64 z : 물체의 z(m단위) 크기.
float32 wheel_base : 차량의 wheel base (m단위) 길이
float32 Overhang : 차량의 OverHang (m단위) 길이
float32 Rear OverHang : 차량의 Rear OverHang (m단위) 길이
float64 max_steering : 차량의 최대 스티어링 (degree)
MAP 데이터 호출 메세지
Morai Map Spec Service Provider(User → Sim)
Service Name : /Service_MoraiMapSpec
srv : morai_msgs/MoraiMapSpecSrv
Request Message Type : morai_msgs/MapSpecIndex
bool load_map_data : 맵 데이터 호출 유무 (현재는 True False 모두 Map 데이터를 호출한다)
True : map_data_load
False : map_data_load
Response Message Type : morai_msgs/MapSpec
int32 plane_coordinate_system : 맵의 평면 좌표계 정보
0 : UTM (Virtual Map 은 UTM 으로 표시된다.)
1 : TM
int32 utmNum : UTM Zone 정보
한반도는 대부분 52 Zone 이다.
TM 과 Virtual Map 인 경우 0 이 나온다.
geometry_msgs/Vector3 UTMoffset : 맵의 오프셋 정보
float64 x : x
float64 y : y
float64 z : z
String ellipse : 타원체 종류
“WGS84”
“GRS80”
둘중 한가지 데이터가 나온다. (Virtual Map 의 경우 WGS84 로 출력)
float64 Central_latitude: central latitude (y-axis origin)
float64 Central_Meridian : central meridian (x-axis origin)
float64 ScaleFactor :
float64 FalseEasting : X 좌표 동위 이동 추가 값
float64 FalseNorthing : Y 좌표 북위 이동 추가 값