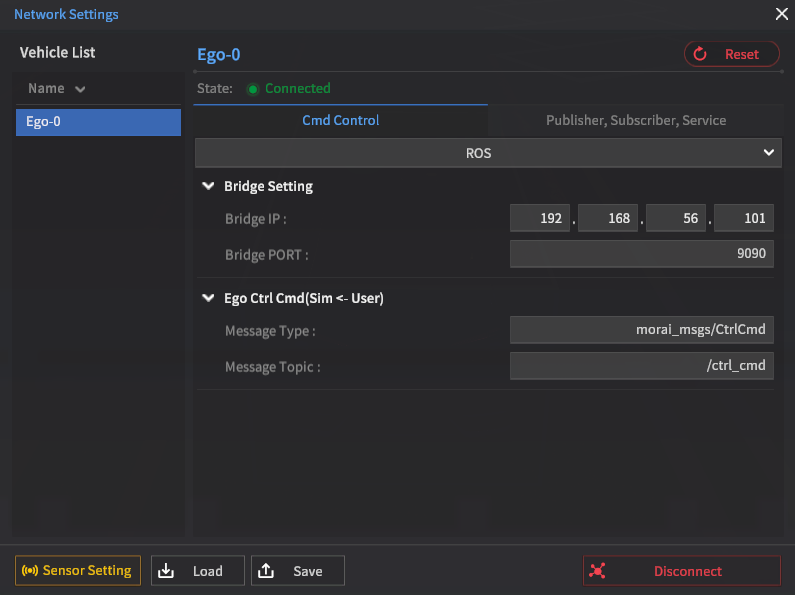
MORAI SIM은 UDP와 ROS 프로토콜을 기본 제공한다.
Autoware.AI 또는 Apollo와 같은 복합적인 시스템 설정은 별도 Quick Start Guide 페이지를 참조한다.
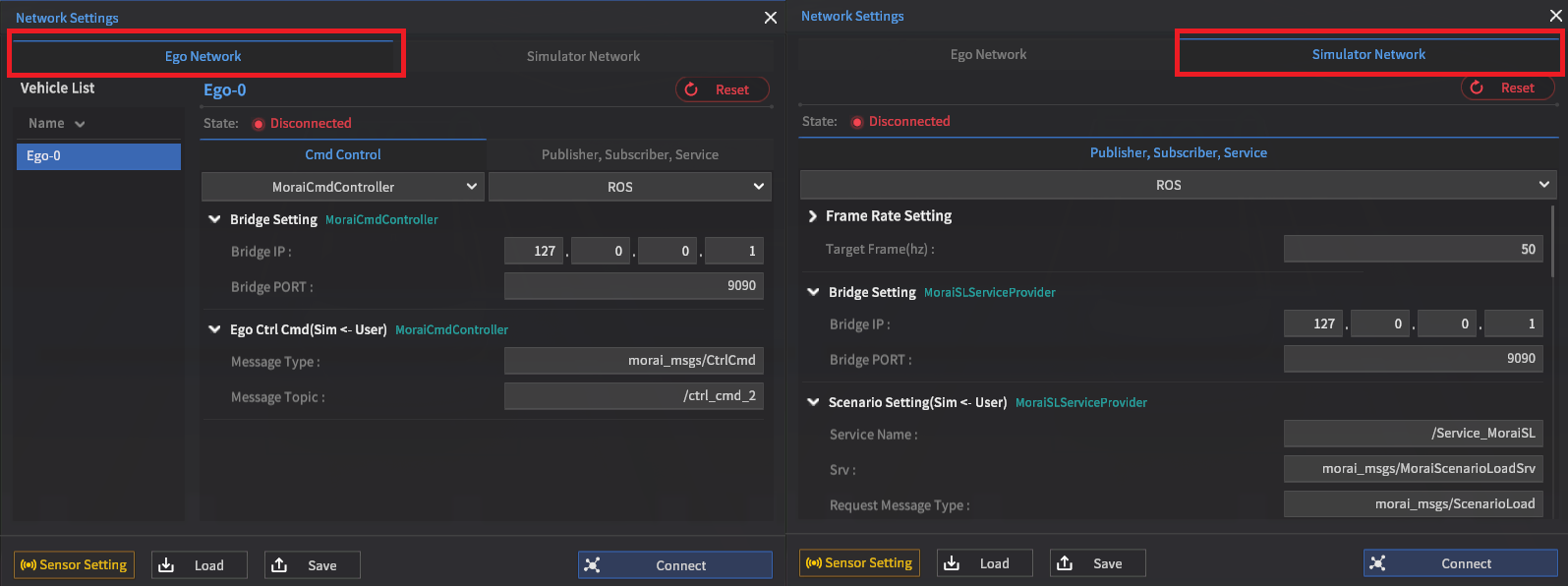
네트워크 설정 창 UI 변경 (21.09.07 기점)
기존에는 모든 네트워크가 Ego 차량에 종속적이었으나, 시뮬레이터 자체에만 연결이 필요한 네트워크 환경을 지원하기 위하여, 더불어 네트워크 설정 창의 효율성을 향상하기 위해 Ego Network 탭과 Simulator Network 탭으로 구분했다.
Simulator Network 탭으로 옮겨진 항목 목록
ROS
Scenario Setting (Sim<-User)
-MoraiSLServiceProvider
Sim Proc Handle (Sim<-User)
-MoraiSimProcHandleSubscriber
Sim Proc Handle (Sim<-User)
-MoraiSimProcServiceProvider
Sim Proc Status (Sim->User)
-MoraiSimProcStatusPublisher
Get TrafficLight Status (Sim<-User)
-MoraiTLServiceProvider
Vehicle Spec Srv (Sim<-User)
-MoraiVehicleSpecServiceProvider
Multi Ego Setting (Sim<-User)
-MultiEgoTransformHandler
Vehicle Collision Data (Sim->User)
-VehicleCollisionInfoPublisher
UDP