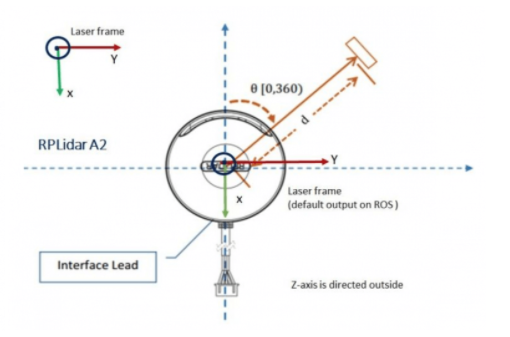
MORAI SIM Standard User Manual (KR, v4.6) Release Notes Current: Release Notes v4.6 Release Notes v4.6 Release Date2021/09/07 20:00 PM (GMT +9)SimulatorMORAI SIM StandardVersionv4.6.210907.1Release R _ 2021.09.07 _ v4.6.210907.1 Updates네트워크 리팩토링에 따른 Network Setting UI 변경v4.6.210907.1 버전부터 Ego Network와 Simulator Network로 구분.Baidu Apollo UpdateObject & Traffic Ground Truth 데이터 추가.Map Editor - GPS 음영구간 제작 기능 추가Shaded Area(음영 구간) 배치 후 Noise 추가 가능.Extra Asset Bundle 활용 방법 안내 추가 Scene / Object 생성 방법 안내.경찰 수신호 애니메이션 Update경찰 수신호의 종류 표시 방법 및 수신호 설명 안내.Synchronous Mode (ROS) UpdateTick과 Control Message 분리Sensor Capture Message 추가예제 수정 및 추가Map 추가(Beta) 세종시 간선급행버스체계(BRT)맵 이름: R_KR_PR_SejongBRT0.(Beta) 대구시 지능형자동차부품진흥원 주행시험로맵 이름: R_KR_PG_KIAPI.Bug FixesUDP / MSC API 이용 Scenario Load 후 Pause 모드 설정 시 Play 명령 미 동작 개선.R_KR_PR_Sangam(상암맵) 4색 신호등 점등 로직 순서 이상 개선.Multi-Ego의 Ego-2 ROS 통신 Connect 불가 개선.Hot FixH1 _ 2021.09.08 _ v4.6.210907.H1 최초 맵 진입 후 다른 맵으로 진입 불가 에러 건 개선.H2 _ 2021.09.14 _ v4.6.210907.H2 Camera/LiDAR 센서 Semantic Segmentation 완료물체 색상 구별.탈 것과 타 있는 사람 간 색상 구별.Sensor Capture 저장 시, LiDAR Noise Filter 미반영 개선 완료LiDAR Sensor 설정 시, Noise 필터 입력 조건에 맞게 출력 값에 반영.3D LiDAR Velodyne 64ch(HDL 64) ROS 통신 Performance 이슈 개선 완료Frame Drop 현상 개선.2D LiDAR 좌표계 수정 완료RPLiDAR A2 좌표계로의 수정 완료.RPLiDAR A2 좌표계 정보.H3 _ 2021.09.15 _ v4.6.210907.H3 Sensor Capture 저장 시, LiDAR의 포즈 미반영 개선 완료LiDAR 포즈 반영의 경우 Veloview 좌표계에서 ROS 좌표계로의 적용.Map 추가Custom 맵: V_RHT_Suburb_02.H4 _ 2021.09.29 _ v4.6.210907.H4 Scenario 로드 시, Ego 네트워크에서 발생한 이슈 개선 완료 ×