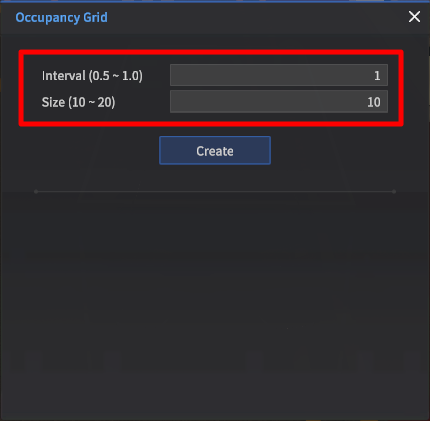
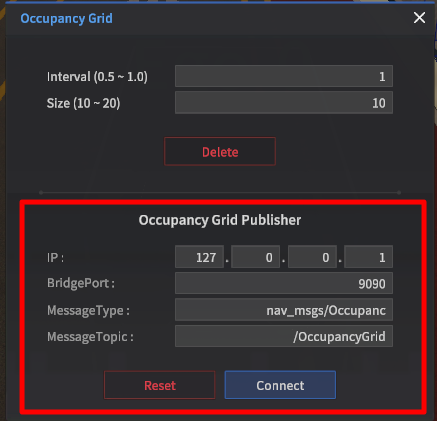
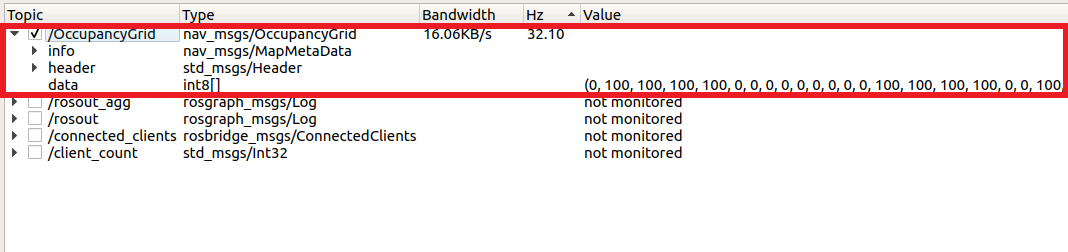
MORAI SIM Standard User Manual (KR, v4.6) Current: Occupancy Grid Map 사용방법 Occupancy Grid Map 사용방법 Occupancy Grid Map 사용 방법Occupancy Grid 생성시뮬레이터 실행 상단의 Tools - Occupancy Grid 클릭 OccupancyGridInterval : 하나의 Occupancy Grid 크기 (10 ~ 20)Size : Ego Vehicle 에서 Occupancy Grid 경계 까지 길이 (1.0 ~ 2.0)(10 이면 가로 세로 가 20인 Occupancy Grid Map 이 생성된다)Interval, Size 설정 후 Create 클릭차량 주변 Object가 인지 되면 육면체 모양으로 Object의 위치를 인식한다OccupancyGridPublisherIP 와 Port 번호 세팅Message Type : nav_msgs/OccupancyGridDefault Topic : /OccupancyGrid네트워크 설정 후 Connect 클릭 ROS 메세지가 Publish 된다 Occupancy Grid ROS 메세지Ubuntu ROS 세팅Ros bridge 실행$ roslaunch rosbridge_server rosbridge_websocket.launchRQT 실행$ rqtPublish 되는 데이터 rqt 를 통해 확인int8[] data : Occupancy Grid 의 데이터사람: 10차량: 20구조물: 70Ego Vehicle 기준 좌측 하단이 0번으로 시작하여 첫 Grid 이고 우측 상단이 마지막 Grid 이다 ×