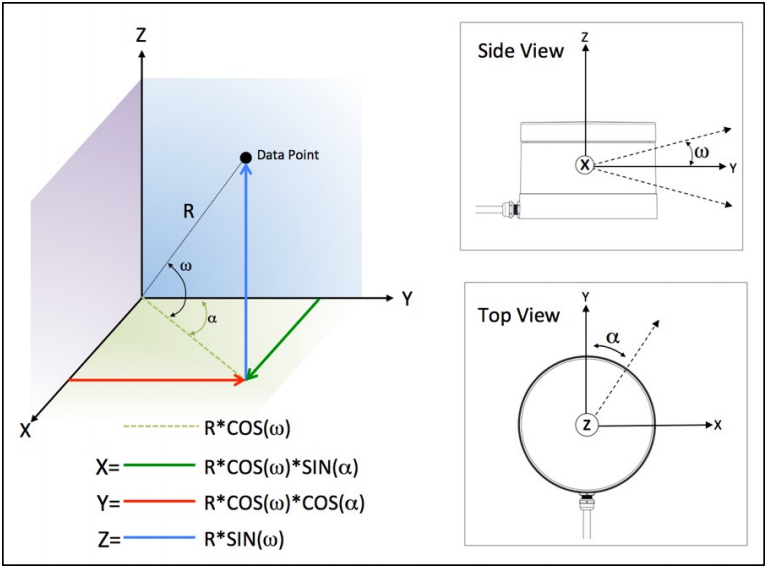
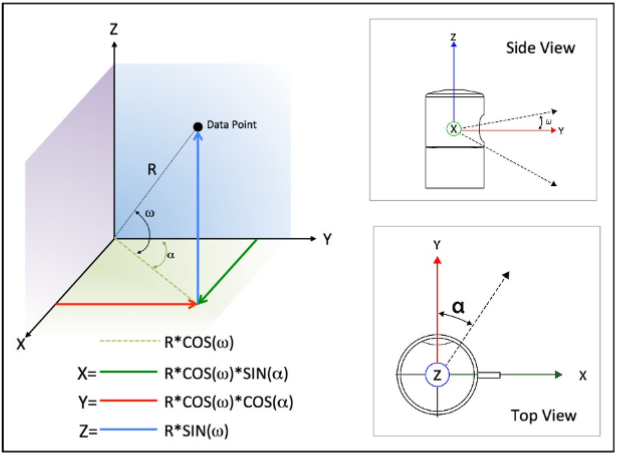
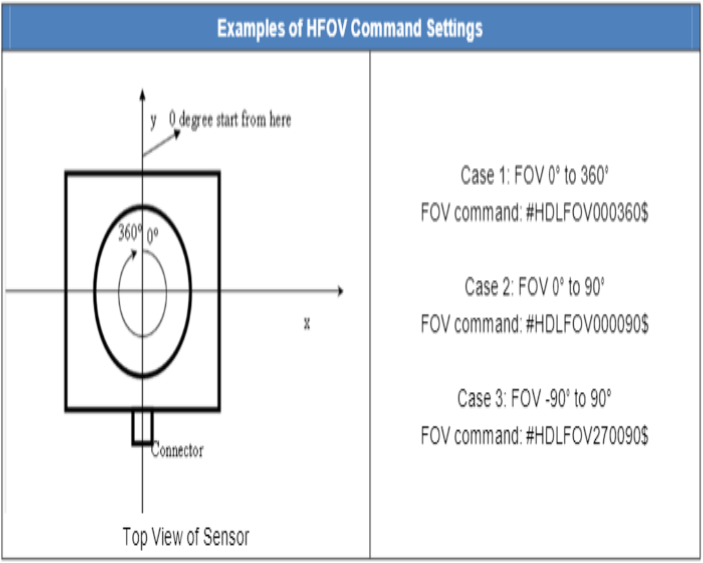
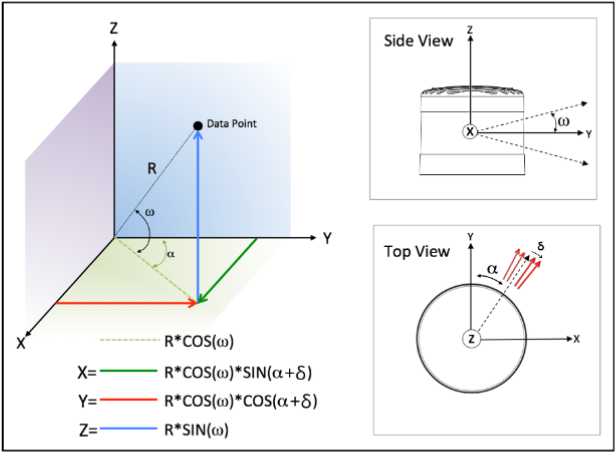
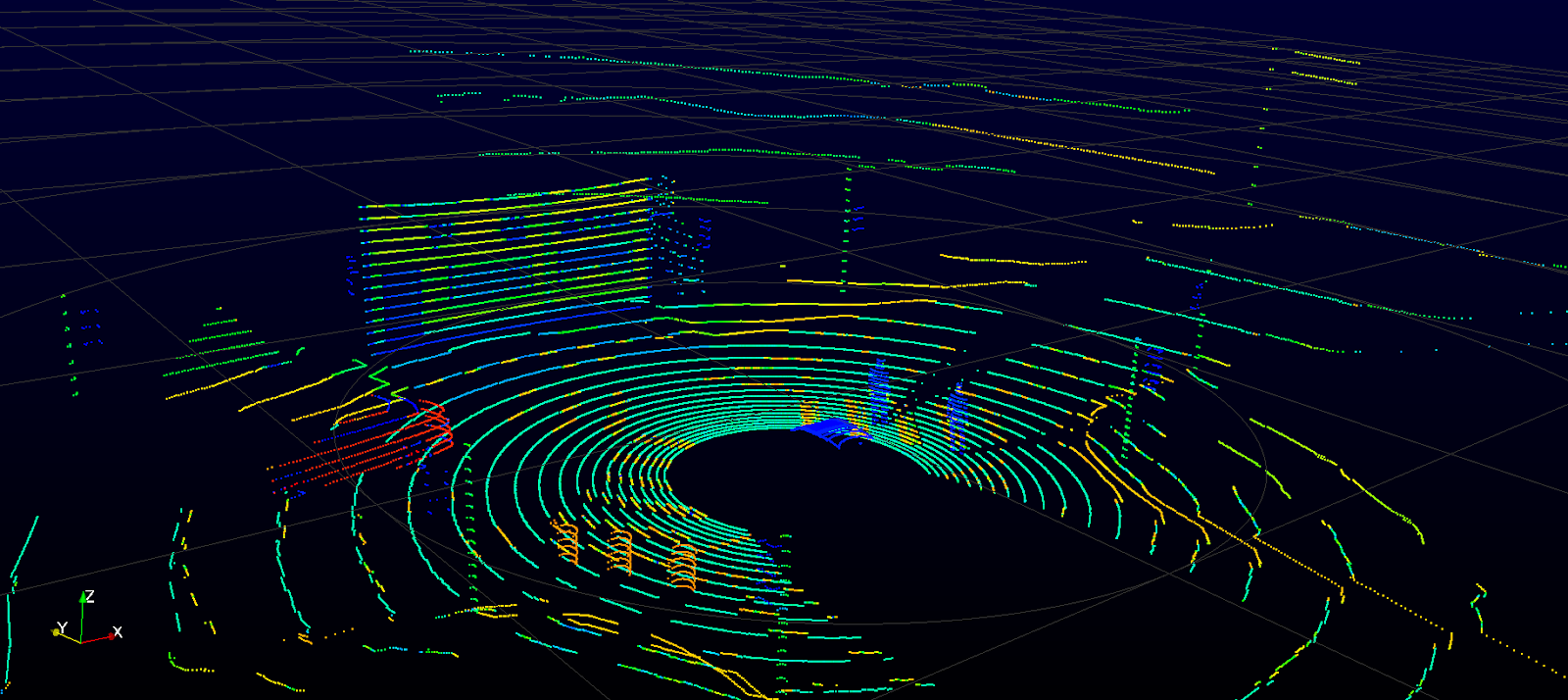
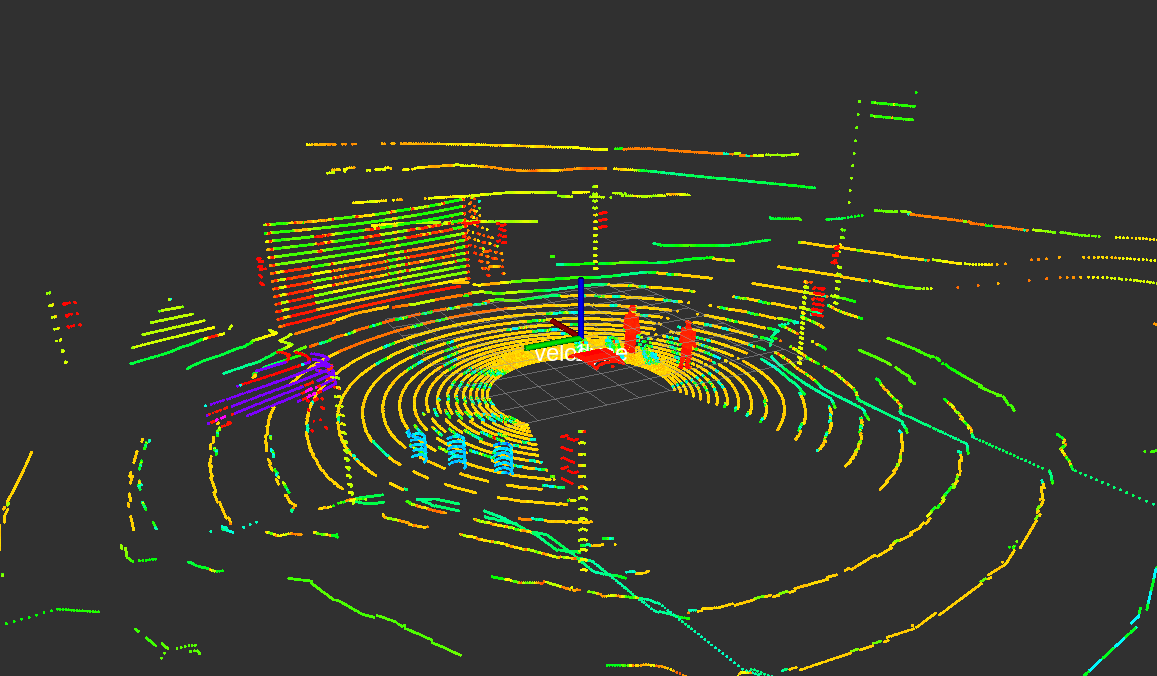
MORAI SIM Standard User Manual (KR, v4.6) Coordinate System Current: 센서 좌표계 센서 좌표계 IMU 좌표계6 자유도 계의 값을 측정한다.( X, Y, Z, roll, pitch, yaw ) IMU 센서 출력 데이터linear_accelerationX : IMU 센서의 X 축에 대한 가속도 (전진 + 후진 -)Y : IMU 센서의 Y 축에 대한 가속도 (Left + right -)Z : IMU 센서의 Z 축에 대한 가속도 (UP + Down -)angular_velocityX : IMU 센서의 X 축에 대한 각속도 (Roll)Y : IMU 센서의 Y 축에 대한 각속도 (Pitch)Z : IMU 센서의 Z 축에 대한 각속도(Yaw)(반 시계 방향 + 시계 방향 -)orientationX : Quaternion X 벡터Y : Quaternion Y 벡터Z : Quaternion Z 벡터w : Quaternion w 벡터GPS 좌표계UTM 좌표계 사용UTM52N (WGS84)EPSG:32652+proj=utm +zone=52 +ellps=WGS84 +datum=WGS84 +units=m +no_defsVelodyne LiDAR 좌표계forward : y right : x up : zVelodyne LiDAR manual 정보 < 16ch LiDAR > < 32ch LiDAR > < 64ch LiDAR > < 128ch LiDAR > ROS Axis OrientationROE 103 (ROS Enhancement Proposals) 에 나타난 ROS 표준 단위를 확인하면 ROS의 기본 단위를 확인할 수 있다. ( https://www.ros.org/reps/rep-0103.html#id14 )forward : xleft : y up : zROS Velodyne_driver 사용ROS Velodyne_driver를 통해 데이터 출력 시 기존 Velodyne의 좌표계가 아닌 ROS의 기본 좌표계로 표현된다Velodyne LiDAR 의 좌표는 (forward : y right : x up : z) 에서 (forward : x left : y up : z) 로 나오게 된다.Simulator 이용한 Veloview 와 ROS Rviz 비교Simulator 화면VeloviewRviz Veloview Axis Rviz Axis ×